Вывод из эксплуатации ядерного реактора — долгая и дорогостоящая работа, требующая очень высокой квалификации. Кроме этого ее необходимо выполнять в высокорадиоактивной среде, загрязненной всеми видами ядерных отходов. Это ставит рабочих в незавидное положение, когда им нужно быть непосредственно на месте действий и как можно дальше одновременно.
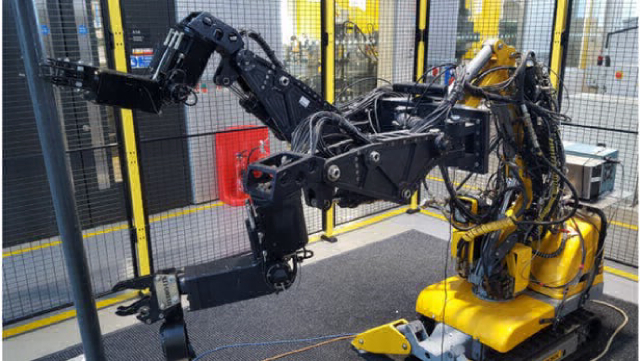
Команда инженеров из Ланкастерского университета представила полуавтономную роботизированную систему по демонтажу выведенных из эксплуатации реакторов. Используя новое программное обеспечение для обработки изображений и камеру Microsoft Kinect, мобильный робот с двумя манипуляторами может распознавать, захватывать и резать объекты, например трубы без необходимости постоянного контроля со стороны оператора.
«Для вывода ядерных систем из эксплуатации стандартно требуется дистанционное управление роботами со стороны оператора. Это достаточно сложно, учитывая специфику самого процесса, — подчеркнул Джеймс Тейлор, профессор инженерного факультета университета. — Полностью автономные решения вряд ли будут считаться безопасными в ближайшем будущем, поэтому мы исследовали создание полуавтономного решения в качестве «золотой середины».
Робот-прототип оснащен руками с гидравлическим приводом и камерой, которая не просто фиксирует изображение. Вместо этого компьютер анализирует изображения, позволяя технологическому решению идентифицировать объекты и определять каким образом их захватывать, манипулировать и разрезать. Вместо обычного джойстика оператор указывает на нужный объект на экране, а манипулятор выполняет всю остальную работу.
«С помощью всего одной камеры, установленной на роботе, наша система фокусируется на выполнении общей задачи в таких суровых условиях — выборе и резке труб, — рассказал Тейлор. – Оператор может проинструктировать манипулятор в отношении выполнения захвата и резки труб всего лишь посредством четырех щелчков мыши. Испытания показали, что такая система превосходит по функциональности стандартные джойстики. Это позволит контролировать робот в целом, а также значительно снизит нагрузку на пользователя и сократит время, затрачиваемое на выполнение работы».
Для использования системы не требуется интенсивного обучения. Ожидается что специалисты оснастят технологические решения несколькими датчиками звука и температуры, чтобы пользователи могли получать еще больше информации об условиях в местонахождении реактора.
Разработка уже была успешно протестирована в лаборатории несколькими операторами, когда роботы выполняли резку пластиковых труб. Предстоит еще много работы, в том числе по защите самих технологических решений от радиационных повреждений.
Автор: Артур Золотов: 19.06.2019
Источник: Newatlas
allowfullscreen=
Источник: